
SUPMAST 拥有强大的 SUP-自主智控系统,从多维感知、车辆导航、调度协同,到作业控制、3D仿真、人机交互等能力,全面赋能生产,保障了高效稳定的落地。灵活开放框架,让设备与人员实现更高效的联接与协同,为客户实现数智化升级。

让你的库房一键升级成智能仓储
萨同学S-WMS 库房管理系统拥有强大的业务和数据管理能力,高效、稳定、智能化,并具备高度的灵活性、可靠性和扩展性,部署简单,适配各类业务,能够确保物料、库存、订单等数据的实时同步,大幅降低了客户智能化项目的改造成本和集成难度,实现优化库存管理、提升作业效率。

帮助客户快速实现智能仓储
萨同学S-WMS 库房管理系统,可以在ERP供应链和移动机器人之间建立链接,满足各种相关协议,轻松管理各类机器人,从而大大降低客户智能化仓储物流的成本和难度,快速实现智慧物流和一体化配送。
智能化库位管理 + 批量高效处理能力
系统支持基于排、列、层、深的四维坐标体系进行库位的精确定位与管理
通过部署可定制化的光电传感器网络,实现对每个库位状态的实时监控与自动更新
可根据实际需求灵活设定库位的状态,包括但不限于货物存放详情、占用情况以及是否处于锁定状态
面对大规模货物进出场景,提供强大的批量处理功能,能够快速完成多个SKU的同时入库或出库操作
系统无缝集成如呼叫器、条形码扫描枪等多种外围设备,适应不同的工作环境需求
提供全面的API接口支持二次开发,便于企业根据自身业务逻辑定制解决方案
4大功能特色 灵活应对现场各种业务难题
萨同学云枢S7 RDS车辆调度系统,凭借四大核心功能特色,全面赋能智能物流调度管理。系统具备高度开放的接口能力、智能高效的调度算法、可视化数字孪生平台以及精准的仿真验证机制,可灵活应对复杂多变的现场业务场景,轻松解决多样化设备接入难、流程调整慢、协同效率低等实际难题,助力企业实现调度智能化、管理精细化与运营高效化。
业务流程
脚本化
支持任意
机器人型号
支持各类
外部设备
支持
深度定制
人性化
调度策略
实时动态
调整
优化资源
利用
安全行驶
碰撞预测
场景
可视化
订单进程
监控
运行数据
黑匣子
智能
分析
优化
方案设计
部署前
验证
优化
业务流程
降低
试错成本
无缝对接多元系统 实现定制化集成
云枢S7 RDS车辆调度系统系统能通过编写自定义脚本的方式,灵活配置和管理复杂的订单流程和服务逻辑,从而实现多辆AMR机器人之间的高效协作
无缝对接托盘搬运车、托盘堆垛车、顶升车、前移式叉车等不同类型的自动导引型机器人

无缝对接充电机,机器人自动充电,保障连续作业能力
通过与自动门系统的深度集成,机器人在不同区域顺畅过渡,提高进出效率

支持与电梯系统的联动控制,实现多层建筑的高效搬运,扩展作业范围

条形码/二维码扫描器、光电传感器、超声波传感器、摄像头与计算机视觉系统等
支持Python、C#、C/C++、Java、TypeScript、JavaScript等多种语言进行定制开发
实现高度定制化的功能开发,还可以深入到系统的各个层面进行定制

根据特定业务场景,可定制完全匹配的不同类型的调度系统
实现动态需求下的全局效率最优
根据机器人的物理位姿和安全边界,智能分析机器人作业中遇到的占位、冲突、阻挡等情况, 基于路网有向图,采用停车让行、推挤、绕行等策略,实时规划机器人的行驶路线,全面保障作业交通流畅,所有机器人都能安全高效完成任务。
让行
堆挤
绕行
实时动态调整机器人的行驶路线,有效应对密集库位等复杂场景。

根据每种车型的特点以及当前的任务需求,智能分配最适合执行特定任务的车型。

通过先进的传感器技术和算法模型,预测潜在冲突,并采取相应的避让措施。
实时数据助力精准决策与运营升级

支持二维、三维视图实时显示机器人和设备的状态
全局进程全掌握

记录和回放场景运行的过程数据,为故障诊断提供数据支持

智能分析全局资源利用情况,涵盖自动充电、无任务时返回待命点、依据任务需求自动选车及车型识别,并集成数据分析功能优化运营效率
高精度预演 保障业务方案高效可行
采用先进的模拟技术和数据分析工具,在早期阶段识别出潜在的改进点,确保最终方案既高效又符合实际需求
在全面部署之前,执行一系列严格的测试和验证步骤,包括实地试验和用户反馈收集,以确保系统稳定性和用户体验
深入分析现有流程中的瓶颈和浪费,进而提出针对性的改进建议,提升整体运营效率
通过建立快速迭代和持续集成的开发模式,结合虚拟仿真技术的应用,可以在不影响正常运营的前提下进行多种方案测试,有效减少错误带来的成本
操作简单 智能可见
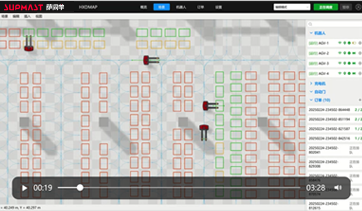
萨同学智能调度可视化系统S-MAP/S-3D MAP是集实时数据反馈、数字仿真、系统模拟为一体的可视化平台,提供二维与3D双模式动态监控。通过构建数据和现场实时动态场景,高精度还原厂房布局及全场设备运行状态,全方位展示任务数据,直观了解货物信息、机器人实时位置及任务进度。以毫秒级数据反馈,实现异常预警、拥堵预判与智能调度的实时响应,为复杂场景下的多机协同提供高效精准的决策依据。
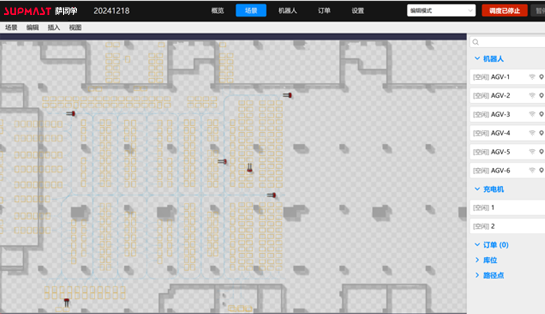
机器人可视化地图
数字化监控界面
机器人运行、库位详情、任务列表、充电机状态数据实时监控
毫秒级实时反馈
轻松掌握机器人运行、库位状态等全局内容
多种功能 简单易用
提供分区、比例尺等丰富地图功能,软件轻松上手

3D机器人可视化地图
三维仿真 1比1场景还原
全程立体可视化的用户界面,供操作人员精准交互和管理
全程数字化 全局状态更清晰
实时监测机器人的运行状态及库位详情,任务进度全掌控
毫秒级数据响应 动态实时监控
实时交换点位数据反馈,保障运转效率
高性能AMR核心控制器
萨同学incont S7 核心控制器采用线性二次调节器(LQR)、贝塞尔曲线、slam(cartographer)、点云配准(ICP)、自适应蒙特卡洛定位(AMCL)、模型预测等算法并进行优化。深度集合移动机器人三级安全运行控制管理、机器人运动控制分解算法、机器人应用功能控制运算、数据采集和通讯处理等功能,拥有高可靠、高拓展、高易用、高可控和高适配等优秀特性,为移动机器人提供稳定可靠的智能核心,确保其在复杂状况下依然能保持7x24小时不间断高效运行。


SLAM导航

二维码导航

SLAM导航及二维码导航混合使用

微秒级安全响应
硬件过流闭环,微秒级响应,避免烧毁,保护控制器安全
IP65级防水防尘
防尘最高级,可完全阻挡粉尘侵入;防低压喷水,适应多种工况
宽温宽压 稳定运行
工作温度-45~80°C,电压18~60V,确保在复杂环境下保持稳定性能
|
低配版:二维码和磁条潜伏式 |
标准版:室内叉车、SLAM潜伏式 |
高配版:户外叉车 |
||
|
型号 |
VACGO1 |
|||
|
控制器性能 |
CPU |
Cortex®-M7 |
ARM Cortex-A55*4 |
Cortex A72 *2 + Cortex A53 *4 + Cortex M4* 2 |
|
内存 |
8GB LPDDR4 |
32GB LPDDR4 |
||
|
第一硬盘 |
64GB eMMC |
32GB eMMC |
||
|
第二硬盘 |
64GB SSD |
|||
|
数字输入输出 |
power DO |
1(24V/1A) |
1(24V/1A) |
4(单路带载 24V/1A,4 路总带载能力不超过 4A) |
|
DO |
16路 NPN,与8路PWM复用 |
16路 NPN,与8路PWM复用 |
12 |
|
|
DI |
16路 PNP,与2路(6路DI)编码器复用 |
16路 PNP,与2路(6路DI)编码器复用 |
24(16路PNP+8路NPN\PNP可配) |
|
|
总线接口 |
CAN |
2 |
2 |
2 |
|
RS485 |
3 |
3 |
3 |
|
|
电池通讯接口 |
1 |
1 |
1(CAN/RS485可切换) |
|
|
Sin/Cos编码器接口 |
2 |
|||
|
网络接口 |
以太网 |
5+1路百兆 |
1+1独立千兆 |
5路千兆 TSN |
|
Wi-Fi |
0 |
1 |
Dual-band 2.4G/5G 802.11ac 2T2X |
|
|
LTE/5G |
0 |
0 |
0 |
|
|
其他接口 |
USB2.0 |
0 |
0 |
1 |
|
USB3.0 |
0 |
0 |
2 |
|
|
音频输入/输出 |
0 |
0 |
1/1 |
|
|
急停输入 |
1 |
1 |
1 |
|
|
急停输出 |
1 |
1 |
2 |
|
|
导航精度 |
±5mm ±1° |
±5mm ±1° |
±5mm ±1° |
|
|
参数性能 |
导航速度 |
≤2m/s |
<1.5m/s |
≤2m/s |
|
地图面积(单幅) |
0 |
<400000m2 |
≤400000m2 |
|
|
工作环境参数 |
工作温度 |
-45 ℃~ 80℃ |
-45°C~ 80°C |
温度:-30~55°C/湿度:10~90%,无压缩冷凝 |
|
工作电压 |
18~60V |
18~60V |
24\50V |
|
|
工作电流 |
<2A |
<1A |
||
|
IP等级 |
IP42 |
IP65 |
IP52(IP65定制外壳) |
|
|
重量 |
1.18KG |
1.18KG |
1.48KG |
|
|
长*宽*高 |
21.2*14.3*4.3 cm |
21.2*14.3*4.3 cm |
22.5*13.6*6.5 cm |
|
|
产品认证 |
符合 EN 61010-1:2010,CE-EMC(IEC 61326-1),CE-RED标准;符合 UL 标准 |
|||